Le rythme de Sasaki
Par Pierre-Marie Gagey*, Osamu Sasaki**, Jacques Martinerie***, Michel Le Van Quyen***
* Institut de Posturologie, Paris
** Shinshu University, Matsumoto
*** LENA Salpêtrière, Paris
Introduction
Le corps de l’homme debout est construit comme un pendule inversé possédant un grand nombre de degrés de liberté. Nous observons qu’il peut verrouiller, ou non, un plus ou moins grand nombre de ces degrés de liberté pour contrôler sa position debout au repos, ce qui représente une possibilité de tactiques posturales fort nombreuses, en théorie.
Or l’exploration de ces différentes tactiques par la stabilométrie n’est pratiquement jamais faite, à notre connaissance, bien que nous disposions de deux types d’analyse pour les étudier: l’analyse des forces de cisaillement et l’analyse du rythme des mouvements du centre de pression.
En effet, la période d’un pendule étant une fonction de sa longueur, si la longueur du pendule humain est divisée par le déverrouillage de certains de ses degrés de liberté, alors la période de chacune des parties est nécessairement inférieure à celle du tout, le pendule à un seul degré de liberté.
Nous émettons l’hypothèse que ces modifications de périodicité peuvent se lire sur les enregistrements du centre de pression en étudiant le rythme des mouvements ‘de danse’ de ce point d’application des forces de réaction. Ce rythme nous proposons de le nommer "Rythme de Sasaki". [Par rythme d’un phénomène, nous désignons la série des intervalles de temps qui séparent des événements semblables de ce phénomène.]
Comme le verrouillage/déverrouillage de degrés de liberté n’est pas considéré comme un phénomène aléatoire du contrôle moteur (Bernstein, 1947), cette hypothèse inclut:
1) Que le rythme de la danse du centre de pression est stationnaire,
2) Qu’il peut être modifié dans certaines situations,
3) Que ces modifications peuvent être considérées comme un changement de tactique posturale dans la mesure où l’on constate qu’elles permettent de réagir efficacement à des perturbations.
Nous montrons que ces trois conditions ont été vérifiées par l’expérience de Sasaki et coll. (2002).
Matériel et Méthode
Enregistrements
23 sujets (3 Femmes & 20 Hommes) ont été enregistrés sur plate-forme de stabilométrie aux normes de l’Association Française de Posturologie (Bizzo et al., 1985; AFP, 1985; Gagey et al., 2001) dans trois séries, randomisées, de deux enregistrements successifs dans les situations suivantes :
Yeux ouverts / Yeux ouverts
Yeux ouverts / Yeux fermés
Yeux ouverts / Yeux ouverts sous stimulation optocinétique
La stimulation optocinétique (NOC) était toujours la même : 60°/s, vers la droite, pendant 60 secondes, avec pour consigne de ne pas chercher à suivre une cible. Dix minutes de repos étaient accordées aux sujets entre chaque série.
Analyse du signal
Paramètres globaux : Cinq paramètres globaux ont été calculés : La surface de l’ellipse de confiance à 90% (Takagi et al., 1985), la longueur du stabilogramme en X, en Y, en XY, le quotient du Romberg.
Paramètres structurels: L’indice de similitude de Le Van Quyen et coll. (1999) a été calculé dans chacune des trois séries d’enregistrements, en comparant les stabilogrammes de chaque série :
YO & YO,
YO & YF,
YO ± NOC,
en X et en Y.
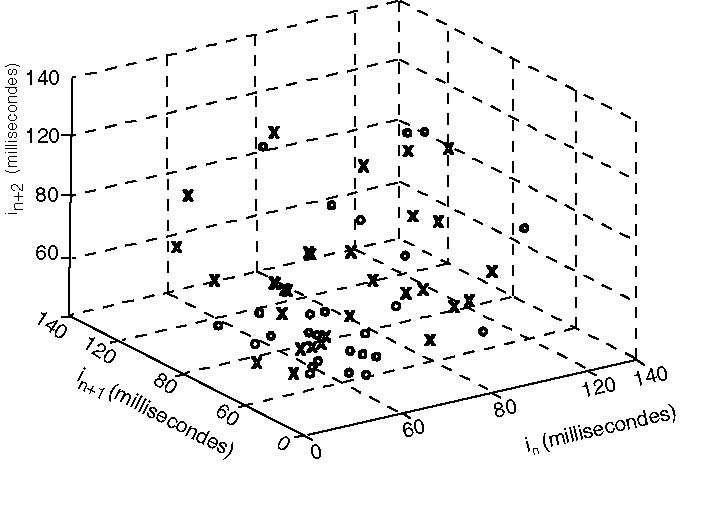
L’indice de similitude exprime, à l’aide d’une intercorrélation, le degré de similitude entre deux nuages de points, construits dans un espace des phases à 8 dimensions (Fig. 1), à partir des données de chaque enregistrement, chaque point d’un nuage étant défini par un vecteur à huit paramètres, dont chaque paramètre successif représente la durée de l’intervalle de temps qui séparent deux événements identiques du stabilogramme (Fig. 2), en X et en Y.
FIG. 1 — Projection sur un espace à trois dimensions des nuages de points dont la similitude est étudiée dans un espace des phases à 8 dimensions.
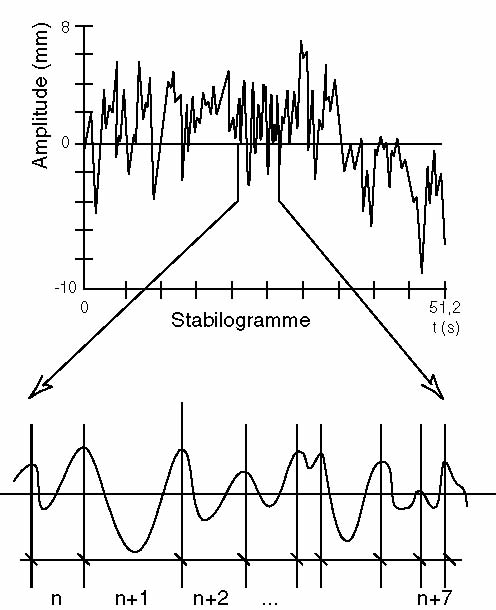
FIG. 2 — Construction des vecteurs élémentaires.
Chaque vecteur élémentaire définissant les 8 coordonnées de chaque point d’un nuage est constitué de la durée des 8 intervalles de temps (n, n+1, …, n+7) qui séparent 9 événements identiques du stabilogramme, ici le passage par un maximum.
Résultats
| Situations | Similitude en X | Similitude en Y |
| YO/YO | 0.859±0.121 | 0.926±0.123 |
| YO/YF | 0.929±0.100 | 0.892±0.101 |
| YO±NOC | 0.755±0.272 | 0.804±0.197* |
TAB. 1 — Moyennes et écarts-types des indices de similitudes selon les situations comparées
L’indice de similitude ne présente pas de différence significative, en X et en Y, entre deux enregistrements successifs réalisés en situations YO/YO, et entre deux enregistrements successifs réalisés en situations YO/YF.
Par contre, l’indice de similitude présente une différence significative, en Y, entre deux enregistrements successifs réalisés en situations YO±NOC (t=2,59 ; p<0,05), et la distribution de l’indice de similitude en X, dans la comparaison des situations YO±NOC, présente une variance statistiquement très différente (F=5,83 ; p<0.01) de celle de sa distribution dans la comparaison des situations YO/YO.
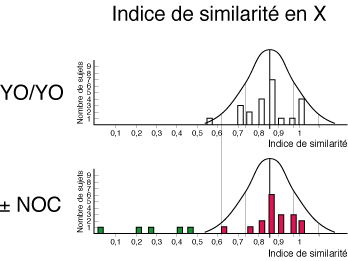
FIG. 3 — Distribution de l’indice de similitude en X dans les comparaison de situations YO/YO et YO±NOC.
Les variances de ces deux distributions sont statistiquement très différentes (F=5,83)
Dans la comparaison YO±NOC, 5 sujets sont en dehors des limites de normalité définies par la comparaison YO/YO.
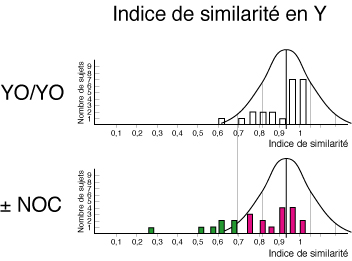
FIG. 4 — Distribution de l’indice de similitude en Y dans les comparaisons de situations YO/YO et YO±NOC.
Dans la comparaison YO±NOC, 7 sujets sont en dehors des limites de normalité définies par la comparaison YO/YO.
Au total 11 sujets sur 23 ont modifié leur rythme de Sasaki sous stimulation optocinétique, soit en X, soit en Y, soit en X & en Y.
Tous les sujets ont rapporté une sensation de vection au cours de la stimulation optocinétique.
Discussion
Stationnarité : Étant donné qu’il n’y a pas de différence statistiquement significative de l’indice de similitude non seulement dans les comparaisons de situations YO/YO, en X et en Y, mais aussi dans les comparaisons de situations YO/YF, en X et en Y, on peut admettre que le rythme de Sasaki, selon cette expérience, serait stationnaire.
Variabilité : Étant donné qu’il existe une différence statistiquement significative de l’indice de similitude en Y entre les comparaisons de situations YO/YO et YO±OKN, on constate, au moins dans cette expérience, que le rythme de Sasaki est modifiable selon les situations imposées au contrôle postural.
Tactique : Lorsqu’on étudie les paramètres globaux des 11 sujets qui modifient leur rythme de Sasaki sous stimulation optocinétique, on observe des performances posturales identiques, alors que les 12 sujets qui ne modifient pas leur rythme de Sasaki sous stimulation optocinétique présentent des performances posturales significativement dégradées (Tab.2).
Le changement du rythme de Sasaki apparaît donc comme une tactique utilisée pour garantir les performances posturales dans des situations qui compromettent la stabilité du sujet.
|
Rythme de Sasaki
|
N
|
Surface (mm2)
|
p
|
|
|
|
|
-NOC
|
+NOC
|
|
|
Non modifié
|
12
|
150±110
|
300±200
|
<0,05
|
|
Modifié
|
11
|
180±90
|
220±90
|
ns
|
TAB 2 — Moyennes et écarts-types des surfaces de statokinésigrames en situations YO±NOC selon que les sujets modifient ou non leur rythme de Sasaki.
On peut remarquer que les 11 sujets qui modifient leur rythme de Sasaki sous stimulation optocinétique se comportent comme des aveugles posturaux pour ce qui est de leurs surfaces (figure 5).
Figure 5 — Variations des surfaces entre les situations YO/YF et les situations Avec/Sans stimulations optocinétiques
Les sujets verts qui modifient leur dynamique posturale sous l’influence de la stimulation optocinétique [SO] (Cf les figures 3 & 4)
ne modifient leur SURFACE de SKG ni entre les situations YO/YF ni entre les situations Avec/Sans stimulations optocinétiques . Ils se comportent comme des aveugles posturaux alors qu'on sait par ailleurs qui réagissent à une stimulation visuelle.
Figure 6 — Variations des longueurs entre les situations YO/YF et les situations Avec/Sans stimulations optocinétiques
Les sujets verts qui modifient leur dynamique posturale sous l’influence de la stimulation optocinétique [SO] (Cf les figures 3 & 4)
modifient aussi leur LONGUEUR entre les situations YO/YF et entre les situations Avec/Sans stimulations optocinétiques . Ils ne se comportent pas comme des aveugles posturaux par rapport aux longueurs.
La "cécité posturale" par rapport aux surfaces et le changement de rythme de Sasaki indiquent de deux manières différentes de gèrer l’information visuelle. Ce qui mérite quelques réflexions sur le sujet....
Conclusion
Le rythme de la danse du centre de pression, ou "rythme de Sasaki" comme nous proposons de le nommer, peut être étudié par une technique d’analyse dynamique non linéaire, cohérente avec la nature dynamique non linéaire du contrôle postural (Martinerie et al., 1992; Myklebust et al., 1995; Thomasson, 1995; Cao et al., 1998; Murata et al., 1998; Micheau et al., 2001; Sasaki et al., 2001; Peng et al., 2002; Shimizu et al., 2002).
Cette étude manifeste que le rythme de Sasaki est stationnaire, modifiable lorsque le contrôle postural est perturbé par des situations particulières, et que cette modification du rythme de Sasaki garantit le maintien de bonnes performances posturales.
Nous émettons l’hypothèse que les modifications de ce rythme reflètent le verrouillage/déverrouillage de degrés de liberté du pendule humain inversé.
Références
A.F.P. (1985) Normes 85. Editées par l'Association Posture et Équilibre, 66, rue de Lisbonne 75008 Paris.
Bernstein N. (1947) On the construction of movements. Medgiz (Moscow)
Bizzo G., Guillet N., Patat A., Gagey P.M. (1985) Specifications for building a vertical force platform designed for clinical stabilometry. Med. Biol. Eng. Comput., 23: 474-476.
Gagey PM., Ouaknine M., Sasaki O. (2001) Pour manifester la dynamique de la stabilisation: la plate-forme AFP40/16. In M. Lacour (Ed.) Posture et équilibre. Nouveautés 2001, conceptuelles, instrumentales et cliniques. Solal, Marseille, 95-106.
Le Van Quyen M., Martinerie J., Baulac M., Varela F. (1999) Anticipating epileptic seizure in real time by nonlinear analysis of similarity between EEG recording. Neuroreport 10:2149–2155
Martinerie J., Gagey P.M. (1992) Chaotic analysis of the stabilometric signal. In M.Woollacott & F. Horak (Eds) Posture and gait: control mechanisms. University of Oregon Books (Portland), Tome I: 404,407.
Micheau P., Kron A., Bourassa P. (2001) Analysis of human postural stability based on the inverted pendulum model with time-delay in feedback. Proceedings of the 2001 american control conference, 1-6, 2297-2298.
Murata A., Iwase H. (1998) Chaotic analysis of body sway. Proceedings of the 20th annual international conference of the ieee engineering in medicine and biology society, 20, PTS 1-6 20 (Pt 1-6) ; p.1557-1560.
Myklebust J.B., Prieto T., Myklebust B. (1995) Evaluation of nonlinear dynamics in postural steadiness time series. An. Biomed. Engn., 23: 711-9.
Peng C.K., Mietus J.E., Liu Y.H., Lee C., Hausdorff J.M., Stanley H.E., Goldberger A.L., Lipsitz L.A. (2002) Quantifying fractal dynamics of human respiration: Age and gender effects. Annals of biomedical engineering, 30, 5, 683-692.
Sasaki O., Usami S-I, Gagey P.M., Martinerie J., Le Van Quyen M., Arranz P. (2002) Role of visual input in nonlinear postural control system. Ex. Brain Res., 147:1–7
Shimizu Y., Thurner S., Ehrenberger K. (2002) Multifractal spectra as a measure of complexity in human posture. Fractals-complex geometry patterns and scaling in nature and society, 10, 1, 103-116.
Takagi A., Fujimura E., Suehiro S. (1985) A new method of statokinesigram area measurement. Application of a statistically calculated ellipse. In Igarashi M., Black F.O. (Eds) Vestibular and visual control of posture and locomotor equilibrium. Karger (Basel): 74-79.
Thomasson N. (1995) Traitement du signal stabilométrique par les techniques d’analyses non linéaires. Rapport LENA, Salpêtrière, Paris.