 |
 |
|
To maintain the CoG and the CoP close to the same vertical, either the CoG (left) or the CoP (right) can be mobilized. |
|
Introduction
Man standing
at rest is never in a state of balance, he stabilizes himself
- i.e. he keeps coming back to his position of balance, but is
unable to remain in that position. Indeed, the equal and opposite
resultants of the forces acting on his body mass - due to gravity
and to ground resistance - respectively apply to his center of
gravity (CoG) and to his center of pressure (CoP), and equilbrium
is reached only if those two points are (very briefly) alined
on the same vertical.
Two basic mechanical models are
therefore available to describe the dynamics of postural stabilization,
depending on whether the CoG or the CoP is being mobilized in
order to reach the vertical line drawn from the other center.
Each model corresponds to very different tactics that we could
usefully refer to as "tactics of the CoP" and "tactics
of the CoG".
|
|
|
|
To maintain the CoG and the CoP close to the same vertical, either the CoG (left) or the CoP (right) can be mobilized. |
|
The notion of CoP tactics is not a revolutionnary one, it has been described as early as 1896, by Mora: «When an acrobat strives to keep a stick, for example or any object, on the end of his nose, he is only concerned by placing his nose below the centre of gravity of the stick, as early as the stick shows the slightest movement. It is the base, which runs, moves constantly, trying to meet the resultant of the weight of the object. It's the same for the human body; it is the lower segment, the organ of support and transport, which comes to take place under the superior segment, the supported and transported organ.»
The requirements of the tactics of the CoG
Let us assume, by hypothesis, that the "tactics of the CoG" only are active and the "tactics of the CoP" are at rest, that is to say that the CoP is fixed and considered merely as a point. The only way to shift the body's CoG then consists in changing the geometry of the body itself, by moving the knees, hips and arms - so that the composition of all the mass centers of the body parts leads to a new position of the CoG close to the vertical of the CoP (fig. 2).
 |
|
|
In order to work
well, such stabilization tactics have to meet a temporal requirement:
the new CoG has to be set by the "tactics of the CoG"
before the old CoG goes beyond the limits that the "instruction"
of the fine postural control system imposes on its clearance -
that is to say well before the vertical of gravity goes beyond
the limits of the support basis.
By comparing the movements of the
CoG around the fixed CoP, to the sway of a pendulum, described
by the equation:
| |
where:
a: maximum distance of clearance of the pendulum
imposed by the "instruction" (in a normal subject in
an open eyes situation as defined by Normes85, we can estimate
that a is approximately equal to the radius of a circle of 100
mm2 of
area, that is to say about 4 millimeters).
T: natural period of the pendulum, about 3.3 seconds for a normal
subject (Bizzo, 1974).
We can say that, in the absence
of any reaction of the "tactics of the CoG", the CoG
would reach the limits imposed on its clearance when:
That is to say:
 |
The period of
the "tactics of the CoG" should therefore be, at least,
inferior to the quarter of the period of the inverted human pendulum.
That temporal requirement of the "tactics
of the CoG", that necessity to feel the imbalance and to
react rapidly, in less than 8 tenth of a second, implies the intervention
of important accelerations, that would be about sixteen times
more important than the acceleration of the CoG.
In order to meet that requirement while
at the same time saving energy, the "tactics of the CoG"
use body parts whose moments of inertia are smaller than that
of the whole body. Stabilizing thanks to the "tactics of
the CoG" therefore requires two systems that have different
moments of inertia.
Men have not waited all this reasoning
to understand that they had to wave their arms and wiggle their
hips when their CoP is set on the ground!
The requirements of the tactics of the CoP
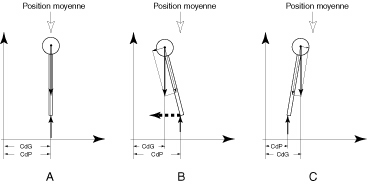
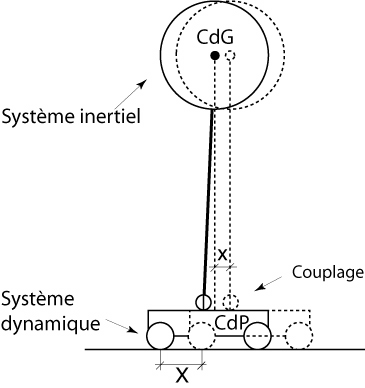
Let us assume, by hypothesis, that the "tactics of the CoP" only are active and the "tactics of the CoG" are at rest, that is to say that we consider the geometry of the body cannot be deformed. When the CoG shifts away from the vertical of the CoP, the only way to bring the CoG back to its mean position consists in shifting the CoP beyond the vertical of the CoG so as to create a return torque (figure 3).
 |
|
A: situation of balance B: when the CoG shifts away from the vertical of the CoP, a torque is created and tends to increase that gap C: the CoP is shifted beyond the vertical of the CoG, the direction of the torque is reversed and it therefore tends to bring the CoG back to its mean position. |
The body does not need to change its geometry in any way in order to stabilize, the mere movements of the CoP suffice. The obvious illustration for those tactics is that of the inverted broom held in equilibrium on a finger (Roberts T.D.M., 1995; Gagey et al., 1997). That example underlines the fact that the tactics of the CoP necessarily use two systems - a passive inertial system that is the broom itself, and an active system whose role is here played by the subject's hand shifting the CoP. Those two systems are connected, via the project of stabilization and via physical contact, but they are independent.
 |
|
|
The tactics of the CoP have to meet
the same temporal requirement as the tactics of the CoG. The same
reasoning, the same calculations can apply, they lead to the same
conclusion: those two coupled systems must have different moments
of inertia. The moment of inertia of the dynamic system that shifts
the CoP must be largely inferior to the moment of inertia of the
passive inertial system. We can indeed easily check that it is
not so difficult to stabilize on the tip of one's finger an inverted
pendulum with a fairly important inertia like a broom, whereas
one is totally unable to stabilize a pen, whose moment of inertia
is much smaller.
Maurice Ouaknine made a robot that
stabilizes an inverted pendulum following those tactics.
 |
 |
|
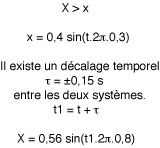
FIG. 5 - The two coupled systems with different moments of inertia of the tactics of the CoP. The fact there are two systems allows a different acceleration, faster for the active part than for the passive one, so that a stabilization of the mass of the pendulum by the movements of the CoP is made possible. (CGS Units; delay; ranges and frequencies: approximate means from experimental data) |
|
Discussion
The real stabilization
Needless to say that in real facts,
man never uses only the tactics of the CoG or only the tactics
of the CoP to stabilize, but a subtile mixture of both. We have
already analyzed, in mono- as well as bi-podal situations, the
mechanisms of the real position shifts of the CoP under the sole
of the subject's feet, due to muscular tensing (Gagey, 1998).
We observe that, in a monopodal situation, the "tactics of
the CoP" are widely used, which could explain the bad results
of the elderly during the test of stabilization on one foot -
the results being all the lower than the subject is more used
to stabilize himself thanks to tactics of the CoG.
The possible role of the "keyboard
of the metatarsals" in the quick and fine mobilization of
the center of pressure has already been mentioned. It is obvious
that the moments of inertia intervening in the mobilization of
those anatomical parts do correspond to the requirements of the
tactics of the CoP. On the contrary, the sharpness of the control
of the stabilization of man standing at rest and even more the
necessary economy of its intervention do not quite fit with certain
conceptions according to which the leg muscles act as a motor
on the whole body mass around the axis of the ankles. It is likely
that the tactics of the CoP intervene proportionally more than
the tactics of the CoG in the real stabilization of man standing
at rest.
The traps of language
Following electromyographic
studies of the reactions of the normal subject to destabilizations,
Nashner and coll. have indeed observed that two strategies of
stabilization exist, distinguished by the temporal organization
of the series of electric muscular events (Nashner L.M., Mc Collum
G., 1985). When muscular tensing began at the level of the leg
muscles and then reached the proximal muscles, those authors spoke
of an "ankle strategy". When, on the contrary, the muscular
tensing began at the level of the hip muscles and then reached
the distal muscles, they spoke of a "hip strategy".
Those denominations, absolutely normal in the context of Nashner's
experiments, run the risk of becoming traps of language if we
keep using them in a different context of reflection. By the way,
it may be useful to remind that since his thesis (1970), Nashner
focused his attention on the postural system taken as a control
system of posture. He studied its input loops and output tactics,
but not its mechanics. Indeed, it is normal to adopt a reducing
point of view in the course of a fundamental study, but one must
know how to free oneself of it and not only when one wants to
build robots or cure patients.
We believe that the expression "ankle
strategy" should be banished from our vocabulary because,
unavoidably, it focuses our attention on those joints, whereas
the CoP is not at the level of the ankles and, indeed, nothing
particularly important occurs at their level as far as stabilization
is concerned (Guilleminot et al., 2001). What is worse,
that expression diverts our attention from the muscles proper
to the foot, whereas it is absolutely not proved that those muscles
do not intervene in the mechanisms of mobilization of the CoP.
On the contrary, the requirements of the tactics of the CoP lead
us to think that they are perfectly indicated to intervene in
the mechanisms of mobilization of the CoP, and even that they
could be the main factors of the sharpness of the control of the
orthostatic posture already observed by Magnus (1924).
The expression "tactics of
the hip", on the contrary, seems to be safe to use, as it
focuses attention on an area quite close to the CoG.
Conclusion
The reference
to those biomechanical models would justify, if necessary, the
therapists' interest in finding out which tactics of stabilization
are used by their elderly patients - tactics of the CoG or tactics
of the CoP (Villeneuve-Parpay et al., 2001; Villeneuve-Parpay
et al., under publication).
Those reflections also raise a few
other questions for the therapists, for instance:
Bibliography