 |
 |
L'homme debout au repos n'est jamais en équilibre, il se stabilise; c'est à dire que sans cesse il revient vers sa position d'équilibre, sans parvenir à y demeurer. En effet, les résultantes égales et opposées des forces qui agissent sur sa masse corporelle - dues à la gravité et à la résistance du sol - s'appliquent respectivement à son centre de gravité (CdG) et à son centre de pression (CdP) et l'équilibre n'est atteint que si ces deux points sont - fugitivement - alignés sur une même verticale.
Pour décrire la dynamique de stabilisation posturale, deux modèles mécaniques de base sont donc à notre disposition selon que l'homme mobilise son CdG ou son CdP pour le mettre à la verticale de l'autre, et chacun de ces modèles correspond à une tactique très différente qu'il est utile de nommer, par exemple la "tactique du CdP" et la "tactique du CdG".
|
|
|
La notion de tactique du centre de pression n'a rien de révolutionnaire, elle est déjà décrite par Mora en 1896: «Ainsi, lorsqu'un acrobate s'ingénie à faire tenir sur le bout de son nez, par exemple, une canne ou un objet quelconque, il n'a d'autre souci, au moindre déplacement de sa canne, que de placer son nez immédiatement au-dessous du centre de gravité de la canne. C'est la base qui court, se déplace continuellement, cherchant à rencontrer la résultante du poids de l'objet. Il en va de même pour le corps humain; 'est le segment inférieur, organe de support et de transport, qui vient se placer sous le segment supérieur, organe supporté et transporté.»
On suppose ici, par hypothèse, que seule la "tactique du CdG" est active, la "tactique du CdP" est au repos, c'est à dire que le CdP est fixe, réduit à un point. Le seul moyen de déplacer la position du CdG du corps consiste alors à modifier la géométrie du corps lui-même, par des mouvement des genoux, des hanches et des bras, de telle manière que, de la composition de l'ensemble des centres de masse des parties du corps résulte une nouvelle position du CdG proche de la verticale du CdP (fig. 2).
 |
Le bon fonctionnement de cette tactique de stabilisation est soumis à une contrainte temporelle: il faut que le nouveau CdG soit mis en place par la "tactique du CdG" avant que l'ancien CdG ne sorte des limites imposées à ses débattements par la "consigne" du système postural fin, c'est à dire bien avant que la verticale de gravité ne sorte des limites du polygone de sustentation.
En comparant les mouvements du CdG autour du CdP fixe, aux oscillations d'un pendule, décrites par l'équation:
| |
où:
a: distance limite de débattement du pendule imposée
par la "consigne" (chez l'homme normal en situation
yeux ouverts dans les conditions prévues par Normes85,
on peut estimer que a est approximativement égal au rayon
d'un cercle de 100 mm2 de surface, soit 4 millimètres
environ).
T: période propre du pendule, de l'ordre de 3,3 secondes pour l'homme normal (Bizzo, 1974).
On peut dire que, en l'absence de toute réaction de la "tactique du CdG", le CdG atteindrait les limites imposées à ses débattements lorsque:
C'est à dire:
 |
La période de la "tactique
du CdG" devrait donc, au minimum, être inférieure
au quart de la période du pendule humain inversé.
Cette contrainte temporelle de la "tactique du CdG", cette nécessité de percevoir le déséquilibre et de réagir vite, en moins de 8 dixièmes de secondes, implique la mise en jeu d'accélérations importantes, qui seraient de l'ordre de seize fois plus importantes que l'accélération du CdG.
Pour satisfaire à cet impératif tout en économisant ses forces, la "tactique du CdG" mobilise des parties du corps dont les moments d'inertie sont plus faibles que celui de l'ensemble du corps. La stabilisation par la tactique du CdG requiert donc deux systèmes dont les moments d'inertie soient différents.
Les hommes n'ont pas attendu tous ces raisonnements pour comprendre qu'il leur fallait battre des bras et tortiller des fesses lorsque leur CdP est fixé au sol!
On suppose ici,
par hypothèse, que seule la "tactique du CdP"
est active, la "tactique du CdG" est au repos, c'est
à dire que la géométrie du corps est considérée
comme indéformable. Lorsque le CdG s'écarte de la
verticale du CdP, le seul moyen de ramener le CdG vers sa position
moyenne consiste à déplacer le CdP au-delà
de la verticale du CdG de telle sorte que soit créé
un couple de rappel (figure 3).
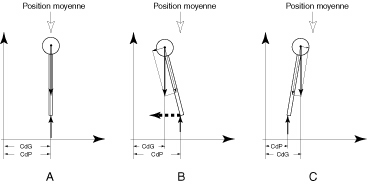 |
A: situation d'équilibre
B: le CdG s'écarte de la verticale du CdP, un couple est
créé qui tend à augmenter cet écart
C: Le CdP est déplacé au-delà de la verticale
du CdG, le sens du couple est inversé, il tend alors à
rappeler le CdG vers sa position moyenne.
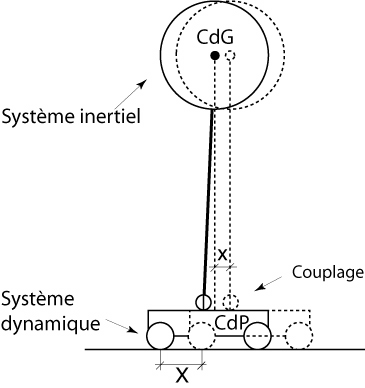
Nul besoin que le corps modifie en quoique ce soit sa géométrie pour être stabilisé, les seuls mouvements du CdP y suffisent. L'exemple évident de cette tactique est celui du balai tenu renversé en équilibre sur le bout d'un doigt (Roberts T.D.M., 1995; Gagey et al., 1997). Cet exemple souligne le fait que la tactique du CdP utilise nécessairement deux systèmes, un système inertiel passif qui n'est autre que le balai lui-même, et un système actif dont le rôle est, ici, joué par la main du sujet qui déplace le CdP. Ces deux systèmes sont couplés par le projet de stabilisation et le contact physique, mais indépendants.
 |
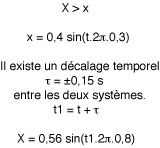
La tactique du CdP est soumise à la même contrainte temporelle que la tactique du CdG. Les mêmes raisonnements, les mêmes calculs peuvent lui être appliqués, ils aboutissent à la même conclusion: ces deux systèmes couplés doivent avoir des moments d'inertie différents; le moment d'inertie du système dynamique qui déplace le CdP doit être largement inférieur au moment d'inertie du système inertiel passif. On peut aisément vérifier d'ailleurs qu'on parvient sans trop de difficultés à stabiliser sur l'extrémité de son doigt un pendule inversé d'inertie relativement importante comme un balai, alors qu'on est strictement incapable de stabiliser un crayon dont le moment d'inertie est beaucoup plus faible.
Ces deux systèmes couplés d'inertie différente peuvent être représentés schématiquement par un pendule inversé rigide dont la base repose sur un chariot léger susceptible d'être animé de mouvements rapides de va et vient pour déplacer le CdP du pendule inversé.
Maurice Ouaknine a réalisé un robot qui stabilise un pendule inversé selon cette tactique.
 |
 |
La stabilisation réelle
Il va sans dire que dans la réalité des faits, l'homme n'utilise jamais uniquement la tactique du CdG ou la tactique du CdP pour se stabiliser, mais un subtil mélange des deux. Nous avons déjà analysé, tant en situation mono- que bi-podale, les mécanismes des déplacements réels du CdP, dus aux contractions musculaires, sous la plante des pieds de l'homme (Gagey, 1998). On constate que, en situation monopodale, la "tactique du CdP" est très utilisée, ce qui peut expliquer le mauvais score des personnes âgées lors du test de stabilisation sur un seul pied; scores d'autant plus bas que la personne a davantage pris l'habitude de se stabiliser par une tactique du CdG.
Le possible rôle du
"clavier des métatarsiens" dans la mobilisation
fine et rapide du centre de pression a déjà été
évoqué. Il est sûr que les moments d'inertie
mis en jeu par la mobilisation de ces pièces anatomiques
correspondent bien aux exigences de la tactique du CdP. A l'inverse,
la finesse du contrôle de la stabilisation de l'homme debout
au repos et plus encore la nécessaire économie de
sa mise en jeu cadrent mal avec certaines conceptions qui accordent
aux muscles de la jambe un rôle de moteur mettant en branle
l'ensemble de la masse corporelle autour de l'axe des chevilles.
Il est donc vraisemblable que la tactique du CdP intervient proportionnellement
davantage que la tactique du CdG dans la stabilisation réelle
de l'homme debout au repos.
Les pièges du langage
A la suite d'études électromyographiques des réactions de l'homme normal à des déstabilisations, Nashner et coll. ont effectivement constaté qu'il existait deux stratégies de stabilisation, distinguées par l'organisation temporelle de la série des événements musculaires électriques (Nashner L.M., Mc Collum G., 1985). Lorsque les contractions musculaires débutaient au niveau des muscles de la jambe puis gagnaient les muscles proximaux ces auteurs ont parlé de "stratégie de la cheville"; lorsqu'au contraire les contractions musculaires débutaient au niveau des muscles de la hanche puis gagnaient les muscles distaux ils ont parlé de "stratégie de la hanche". Ces dénominations, tout à fait normales dans le contexte des expériences de Nashner, risquent de devenir des pièges du langage lorsqu'on continue à les utiliser dans un contexte de réflexion différent. A ce sujet il n'est pas inutile de rappeler que depuis sa thèse (1970), Nashner a focalisé son attention sur le système postural en tant que système d'asservissement de la posture; il en a étudié les boucles d'entrée puis les tactiques de sortie, mais non la mécanique. Certes, adopter un point de vue réducteur est normal au cours d'une étude fondamentale, mais il faut savoir s'en dégager et pas uniquement lorsqu'on veut construire des robots ou traiter des patients.
A notre avis, le terme de "stratégie de la cheville" doit être banni de notre vocabulaire parce que, inévitablement, il attire l'attention sur ces articulations alors que le CdP n'est pas au niveau des chevilles et que, de fait, il ne se passe rien de particulièrement important pour la stabilisation à leur niveau (Guilleminot et al., 2001). Pire, cette formule détourne l'attention des muscles propres du pied alors qu'il n'est absolument pas prouvé que ces muscles n'interviennent pas dans les mécanismes de mobilisation du CdP; au contraire les contraintes de la tactique du CdP nous invitent à penser qu'ils sont tout désignés pour intervenir dans les mécanismes de mobilisation du CdP et même qu'ils pourraient être les principaux artisans de la finesse du contrôle de la posture orthostatique déjà remarquée par Magnus (1924).
Le terme de "tactique de la hanche" par contre semble pouvoir être utilisé sans risque dans la mesure où il attire l'attention sur une zone assez proche du CdG.
L'évocation de ces modèles biomécaniques justifierait, si c'était nécessaire, l'attention des thérapeutes à dépister quelle est la tactique de stabilisation mise en jeu par leurs patients vieillissants, tactique de la hanche ou tactique du...? pied? (Villeneuve-Parpay et al., 2001;Villeneuve-Parpay et al., sous presse).
Ces réflexions posent aussi quelques autres questions aux thérapeutes, par exemple:
Bibliographie
COMMENTAIRES
1) de Kevin GUELTON, Doctorant Automatique/Biomécanique, Ingénieur EIGIP
Il est intéressant de soulever cette question. Si cela se passait au niveau des chevilles uniquement, cela impliquerait dans une première mesure que cette articulation soit modélisée par une liaison pivot. Hypothèse qui peut être justifiée pour des mouvements de grande amplitude. Cependant dans le cas de petits déplacements, la cinématique complexe de cette articulation ne permet pas de stipuler de manière précise sur la position de son axe instantané de rotation.
Ceci dit, si l'on parle de tactique du balais, puisque l'inertie est "importante", la stabilisation peut se faire à l'usage d'accélération du CdP "acceptables". Néanmoins, cela n'impliquerai-t-il pas des déplacements du CdP plus "importants" que la normale?
En vue de ces considérations, je pense que vous avez raison de redéfinir la "tactique de la cheville" en "Tactique du Pied" ainsi que de souligner l'importance de la "Tactique de la Hanche". Le terme "Tactique du Pied" permet donc une plus grande liberté sur la localisation de l'axe de rotation instantané de l'articulation du pendule inversé. Mais cette localisation rend moins aisée toute tentative de modélisation cinématique.
A mon avis le problème n'est
pas de savoir si l'on utilise la tactique du CdP ou du CdG mais
où sont les couples moteurs et quel sont les variables
qu'ils régulent?
Réponse de P.M. GAGEY à Kevin GUELTON
On comprend qu'un biomécanicien puisse écrire «le problème n'est pas de savoir si l'on utilise la tactique du CdP ou du CdG», mais pour un clinicien la chose est d'importance car le passage de la tactique de la cheville à la tactique de la hanche est assez universellement considéré comme un signe de vieillissement du contrôle postural, donc à retarder le plus possible, donc à soigner, donc à dépister (ce qui fait tout l'intérêt des travaux de Sylvie VILLENEUVE). Mais c'est simplement une question de point de vue.
On serait heureux que vous
développiez un peu votre point de vue sur les questions
que vous évoquez: «où sont les couples moteurs?»
et «quel sont les variables qu'ils régulent?».
Cela pourrait relancer la réflexion.
Quand à l'importance des déplacements
du CdP au cours d'une tactique du CdP, je pense fondamentalement
qu'elle est fonction du retard de la boucle de rétroaction
et là il faut bien avouer que l'intégration de l'information
visuelle dans cette boucle pose problème... Or il est bien
difficile de la récuser... Et pour le moment il est difficile
de penser qu'elle puisse avoir lieu en moins de 100/150ms!...
On aimerait savoir ce qu'en pensent BIZZO et OUAKNINE.